Feature(may vary by option.)
●【High performance】 The 10-axis AHRS IMU template contains 3-axis electronic gyroscope + 3-axis accelerometer + 3-axis magnetometer + barometer (angle + altitude), compared with 9-axis gyroscope, the added barometer can calculate the current altitude , which can be used for flight assistance.
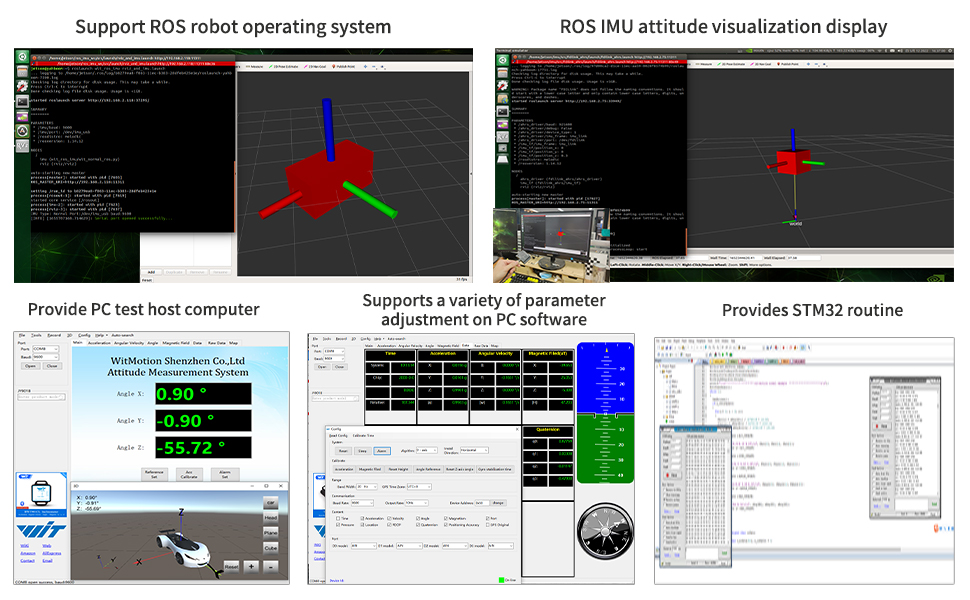
●【Support multiple communication methods】 Support USB/UART/I2C communication methods, more efficient compatible with Raspberry Pi, STM32, jetson series development boards, providing more DIY maker development possibilities.
●【Built-in algorithm to accurately output key data】 Built-in Kalman algorithm, which can output Euler angles (Roll, Pitch, Yaw), quaternion, position, velocity, acceleration, angular velocity, magnetic field vector. It can provide up to 200Hz updated data in real time, so the research and development time for various needs is greatly reduced.
●【What you will get】 In addition to the 10-axis IMU inertial navigation module, you also need an optional module shell (effectively helping the module to dissipate heat and reducing the interference of the external environment), and provide the host computer, operating instructions, development manual, development Code, source code for a lot of tutorials are free.
●【Prompt technical help】Yahboom provides professional and timely technical help, if you encounter difficulties, please keep in touch with us.
[10-Axis IMU module with case]

[10-Axis IMU module without case]

Description

This is a high-precision inertial measurement module that integrates 3-axis gyroscope, 3-axis accelerometer, 3-axis magnetometer and a barometer. The baud rate is 921600, the return rate can reach 200Hz. Built-in algorithm can stably acquire and output data such as magnetic field vector, acceleration, gyroscope, and quaternion. It supports USB/UART/I2C communication methods, which can be applied to many different occasions. We provide PC software, which allows users to adjust the parameters of the module in real time, and reflect the real attitude of the inertial navigation module in real time through the 3D model.

Description
- Stable angle output, yaw angle: 0.5*RMS, attitude: 0.1*RMS
- Gyroscope automatic calibration technology
- Gyro bias, acceleration calibration, magnetometer calibration
- Internally integrated attitude solver
- Serial TTL, 12C communication interface
- 360° stable and continuous angle output
- Includes barometer to measure altitude
- Accepts serial GPS data conforming to NMEA-0183 standard to form GPS-IMU integrated navigation unit.