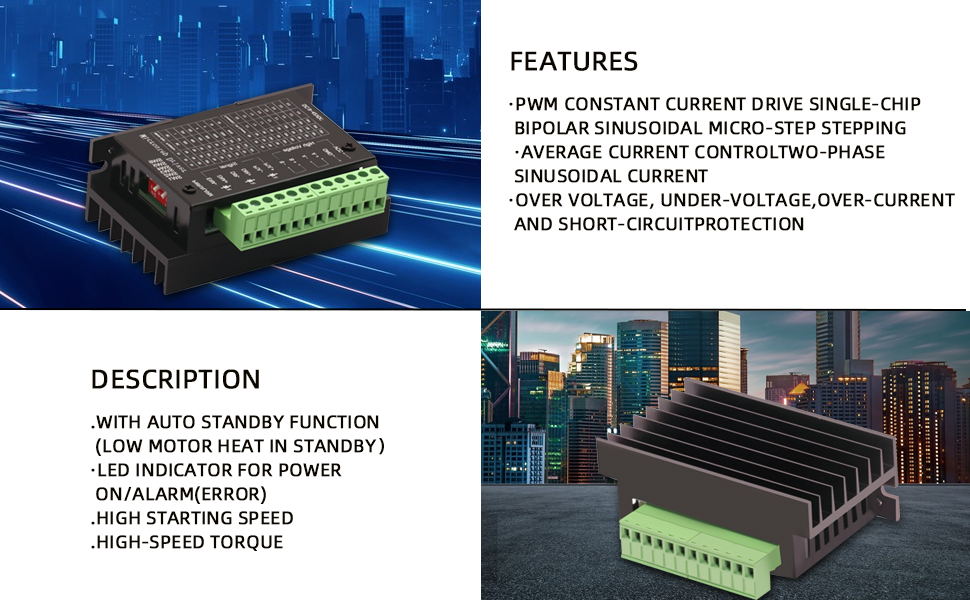
Feature
●TB6600 Motor Parameters: model: TB6600, input voltage: DC 9-42V, current: 4A.
●Strong Voltage Adaptability: The stepper motor driver can operate within the voltage range of 9V to 42V, providing great flexibility and adapting to different power requirements.
●Microstepping Function: The TB6600 motor provides multiple microstepping options, such as full step, half step, 1/4 step, 1/8 step, 1/16 step, etc., making the motor movement smoother and more accurate.
●Protection Function: The TB6600 stepper motor driver has protection functions such as overcurrent, overvoltage, undervoltage, and short circuit, which improves the safety and reliability of the system.
●Widely Used: Due to its high adaptability and reliability, the TB6600 stepper motor driver is widely used in various automation equipment, such as 3D printers, CNC machine tools, laser engraving machines, etc.
Description



Product features:
- DC 9-42V power supply, 12-30V power supply is the best
- The control signal input voltage is 3.3-24V universal (no string resistance required)
- Subdivision accuracy 1-32 subdivision optional
- Output peak current 4.0A
- H-bridge bipolar constant current drive
- Input signal high-speed optocoupler isolation
- Built-in temperature protection and overcurrent protection
- Automatic half flow to reduce heat generation
- Motor noise optimization function
- Small size, save space
|
|
|
|
|
|---|---|---|---|
Side ViewThis driver uses a 6-bit dial switchthe subdivision of this version is increased to 32 subdivision. PRECISION |
Front ViewThis driver is an upgraded version of TB6600 and with plastic cover. SMALLER |
Bottom ViewThis driver uses an alumium alloy base. GOOD HEAT DISSIPATION |
Stereoscopic viewThe view is the outline of the object seen is drawn by orthographic projection, its advantage is easy to draw, the disadvantage is no three-dimensional effect |




Widely used in cutting machines Pick and place devices
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|



